Evaluating the Proximity Sensor HC-SR04.
On this project we will evaluate one of the most popular Proximity Sensors in the Arduino world, the HC-SR04 Ultrasonic Range Sensor, we will learn all we need to learn about it and in future projects we will be comparing it to other types of proximity sensors in the market.
The HC-SR04 uses ultrasound sonar to measure the distance to an object. The SR04 consists of one ultrasonic transmitter, one receiver, and a control circuit. The transmitter emits a high frequency ultrasonic sound, which bounce off solid objects while the receiver listens for any return echo. That echo is then processed by the control circuit to calculate the time difference between the sonic burst being transmitted and received. This time difference is called a Pulse Width and it will help calculate how far, or close, an object is.

| Pin | Function |
|---|---|
| VCC | 5V, input power |
| TRIG | Trigger |
| ECHO | Echo |
| GND | Ground |
To initiate the process of sensing for objects, the software will trigger a sonic burst by rising the voltage on the "Trigger" pin, and after a few milliseconds, it will lower the voltage to zero and wait for a sonic burst bouncing off any close objects, this sonic wave is, in turn, relaid to the controller board through the "Echo" pin.
So the time it takes for the triggered sonic pulse to travel to an object and get back to the sensor divided by two (because we only care about the time coming back) and multiplied by the Speed of Sound will give us the distance to the bouncing object.
Distance = (Speed of Sound * Time)/2
Where speed of sound at sea level is equal 343 meters/s or 34,300 cm/s (1,125 feet/s or 13,504 in/s)
Therefore, Distance = (17,150 * Time) expressed in centimeters or, Distance = (6,752 * Time) expressed in inches
| ### | Name | Description |
|---|---|---|
| 1 | Voltage | DC 5 V |
| 2 | Current | 15mA |
| 3 | Frequency | 40Hz |
| 4 | Max Range | 4 meters |
| 5 | Min Range | 2cm |
| 6 | Trigger Angle | 15 degrees |
| 7 | Trigger Input Signal | 10uS TTL pulse |
| 8 | Echo Output Signal | TTL |
| 9 | Physical dimensions | 45 x 20 x 15mm |
You can get the all the code down below but observe this piece of code which is the heart of the Arduino Mega 2560 Controller program.
Observe how the Sensor's Trigger pin is rised to HIGH for 10microseconds then LOWered to zero followed by issuing the statement "pulseIn" which measures the Pulse Width via the Echo pin.
//------------------------------------------------------------------------
// Routine: TriggerEcho(TriggerPin,EchoPin) -
// Triggers a Pulse and wait for an Echo.
//------------------------------------------------------------------------
float TiggerEcho(int TriggerPin, int EchoPin)
{
long mPwidth = 0; //Pulse Width
//
digitalWrite(TriggerPin, HIGH); //Trigger a 10us duration sonic burst.
delayMicroseconds(10);
digitalWrite(TriggerPin, LOW);
//
mPwidth = pulseIn(EchoPin, HIGH);
//
return mPwidth; //Return Pulse Width measure to calling program.
}
//------------------------------------------------------------------------
// Proximity Sensor SR-04
// Routine to read an SR-04 Sensors using a Mega 2560 Controller.
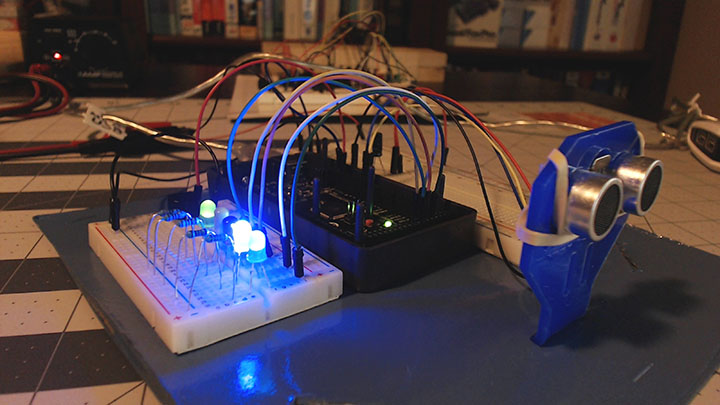
// Uses three leds to help debug the program.
// July 3, 2018
//------------------------------------------------------------------------
#include <stdio.h>
//
//Memory variables
//
//Assigning Name to Controller Board
String mCntrlrName = "A1";
float mcm_L;
float mpWidth;
//
bool mStartOfLoop = true; //Green LED
bool mReadCommPort = false; //Blue LED
bool mReadingSensors = false; //Red LED
bool mPrintCommPort = false; //Yellow LED
bool mEndOfLoop = false; //Green LED
//
//Implement Distance MIN and MAX in cm and inches
const unsigned int cMAX_DISTANCEcm = 400; //Assume this number if object farther than certain distance. 400cm.
const unsigned int cMIN_DISTANCEcm = 30; //Sound the buzzer if object too close. 50cm.
//
//Variables to talk to the Master Computer via USB port
byte mcmdByte0;
byte mcmdByte1;
byte mcmdByte2;
byte mcmdByte3;
//
//Declaration of pins to be used
//
//Proximity Sensors
const int pTrigger_Pin_L = 7; //Left Sensor
const int pEcho_Pin_L = 6;
//
//Leds
const int pLedPin31 = 31; //Start of Loop.
const int pLedPin32 = 32; //Reading Communications Port.
const int pLedPin33 = 33; //Reading Proximity Sensor.
const int pLedPin34 = 34; //Printing To Communications Port.
const int pLedPin35 = 35; //End of Loop and cycling back to start of loop.
//
//Buzzer
const int pBuzzerPin = 13;
//
//------------------------------------------------------------------------
// Routine: setup() -
// Main Setup.
//------------------------------------------------------------------------
void setup()
{
pinMode(pLedPin31,OUTPUT); //Start of Loop.
pinMode(pLedPin32,OUTPUT); //Reading Communications Port.
pinMode(pLedPin33,OUTPUT); //Trigger and get Echo from Sensor.
pinMode(pLedPin34,OUTPUT); //Print measure to computer via USB.
pinMode(pLedPin35,OUTPUT); //Print measure to computer via USB.
digitalWrite(pLedPin31,HIGH); //GREEN
digitalWrite(pLedPin32,LOW); //BLUE
digitalWrite(pLedPin33,LOW); //RED
digitalWrite(pLedPin34,LOW); //YELLOW
digitalWrite(pLedPin35,LOW); //GREEN
//
pinMode(pBuzzerPin,OUTPUT); //initialize the buzzer pin as an output
//
pinMode(pTrigger_Pin_L, OUTPUT);
digitalWrite(pTrigger_Pin_L, LOW);
//
pinMode(pEcho_Pin_L, INPUT);
//
// Activate serial monitor to send/receive communications using 9600 bauds
Serial.begin(9600);
}
//
//------------------------------------------------------------------------
// Routine: loop() -
// Main Loop.
//------------------------------------------------------------------------
void loop()
{
mStartOfLoop = !mStartOfLoop;
digitalWrite(pLedPin31, mStartOfLoop); //GREEN LED on/off
//
if (Serial.available() > 2)
{
mReadCommPort = !mReadCommPort;
digitalWrite(pLedPin32, mReadCommPort); //BLUE LED on/off
//
mcmdByte0 = Serial.read(); delay(10);
mcmdByte1 = Serial.read(); delay(10);
mcmdByte2 = Serial.read(); delay(10);
mcmdByte3 = Serial.read(); delay(10);
}
//
if (mcmdByte0 == 1) // First byte is equal to "1", then someone maybe talking to Arduino,
{
if (mcmdByte1 == 1) // Second byte is equal to "1".
{
if (mcmdByte2 == 1) // Third byte is equal to "1".
{
if (mcmdByte3 == 1) // Forth byte is equal to "1", tell me your ID!
{
Serial.print(mCntrlrName);
}
}
}
//
//..
if (mcmdByte1 == 2) {}
if (mcmdByte1 == 3) {}
//..
//
if (mcmdByte1 == 4)
{
if (mcmdByte2 == 7)
{
PollSensors(); //Read Proximity Sensors.
}
if (mcmdByte2 == 8) {}
if (mcmdByte2 == 9) {}
}
}
//
mcmdByte0 = 0; //Reset Comm bytes to zero.
mcmdByte1 = 0;
mcmdByte2 = 0;
mcmdByte3 = 0;
//
mEndOfLoop = !mEndOfLoop;
digitalWrite(pLedPin35, mEndOfLoop); //Green LED on/off
}
//
//------------------------------------------------------------------------
// Routine: PollSensors() -
// Poll then Sensors.
//------------------------------------------------------------------------
void PollSensors()
{
ReadSensors(); //Call ReadSensors Routine
//
PrintMeasures(); //Call PrintMeasures Routine
//
delay(100); //Wait a few millisecs before loop for next measurement
}
//
//------------------------------------------------------------------------
// Routine: ReadSensors() -
// Reads all the sensors.
//------------------------------------------------------------------------
void ReadSensors()
{
mReadingSensors = !mReadingSensors; //Red LED on/off
digitalWrite(pLedPin33,mReadingSensors);
//------------------------------------------------------------------------
mpWidth = TiggerEcho(pTrigger_Pin_L, pEcho_Pin_L);
mcm_L = mpWidth / 58.0; //Convert the pulse width to centimeters
//That is 58us/cm. or 148us/in.
//------------------------------------------------------------------------
//Too close so play the buzzer.
if (mcm_L <= cMIN_DISTANCEcm){ buzzerX(); }
}
//
//------------------------------------------------------------------------
// Routine: TriggerEcho(TriggerPin,EchoPin) -
// Triggers a Pulse and wait for an Echo.
//------------------------------------------------------------------------
float TiggerEcho(int TriggerPin, int EchoPin)
{
long mPwidth = 0; //Pulse Width
//
digitalWrite(TriggerPin, HIGH); //Trigger a 10us duration sonic burst.
delayMicroseconds(10);
digitalWrite(TriggerPin, LOW);
//
mPwidth = pulseIn(EchoPin, HIGH);
//
return mPwidth; //Return Pulse Width measure to calling program.
}
//
//------------------------------------------------------------------------
// Routine: PrintMeasures() -
// Print Measures.
//------------------------------------------------------------------------
void PrintMeasures()
{
mPrintCommPort = !mPrintCommPort; //Yellow LED on/off
digitalWrite(pLedPin34,mPrintCommPort);
//------------------------------------------------------------------------
String mL((float)mcm_L);
Serial.print("L"+mL+"cm ");
}
//
//-------------------------------------------------------------------------------
// buzzerX Routine - Sound the buzzer.
//-------------------------------------------------------------------------------
void buzzerX()
{
for(int i=0;i < 5;i++)
{
digitalWrite(pBuzzerPin,HIGH); //Turn buzzer on
delay(5); //wait 5ms
digitalWrite(pBuzzerPin, LOW); //Turn buzzer off
}
}
Videos
SR04 Proximity Sensor.
C# program.
C# program interacting with three sensors.
C# program interacting with five (5) sensors.